What to Evaluate Before Buying a Customized 6 Axis Force Sensor Online
A quick truth from the field. Most teams do not fail because they picked the wrong robot or control system. They fail because the force sensor feeding that system was not right.
Buying a customized 6 axis force sensor online feels easy now. A few clicks, a few emails, and it’s done. But under the surface, this is one of the most critical choices you will make in any motion or automation project.
This guide walks you through what actually matters before you buy. Not theory, real checks that protect your data, your timeline, and your budget.
First, understand what a 6-axis force sensor really does
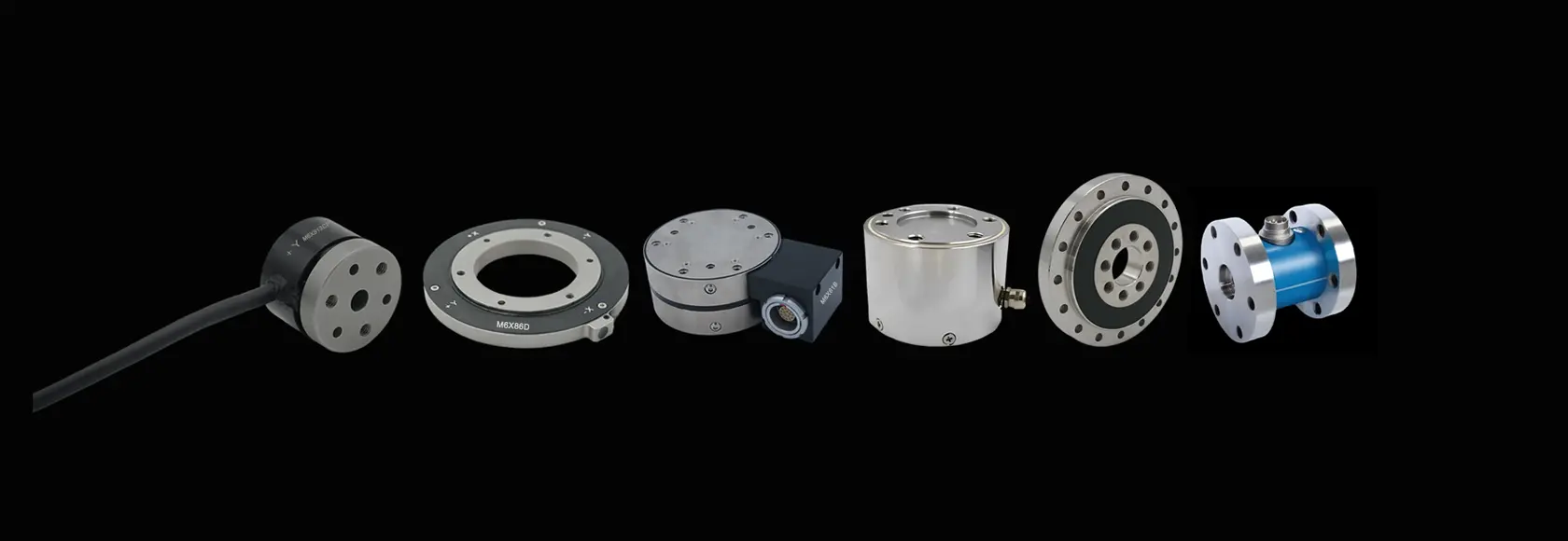
A 6 axis force sensor measures forces and torques in all directions. Three linear forces, three rotational moments, all at once.
These sensors show up in robotics, medical tools, aerospace testing, and precision assembly. When they work well, systems feel smooth and smart. When they do not, everything feels off.
So, choosing the right one is not optional because it is foundational.
Define your real force and torque ranges
This step sounds obvious. It is also where most mistakes happen. Do not design for average loads. Design for peak loads.
What to check:
- Maximum force in each axis
- Maximum torque in each rotation
- Safety margin for overload
- Directional load combinations
A real-world case from robotic grinding shows that underestimating torque by 15 percent led to sensor fatigue within months. That costs more than the sensor itself.
Accuracy is more than a single number
Many online listings highlight accuracy in big bold text, but look deeper.
- Evaluate accuracy properly
- Resolution at low forces
- Repeatability over time
- Cross-talk between axes
- Thermal drift behavior
For precision tasks, cross-talk is often the silent killer. Poor axis isolation creates noisy data that software cannot fully fix later.
Custom mechanical design matters more than electronics
A sensor that fits poorly could become a problem.
Things mechanical to look over:
- Compatibility with mounting interfaces
- There are limits on size and weight
- Choice of material for stiffness

How to route cables and relieve stress
Customized force sensors for 6 axis should work well with your setup. If you need adapters everywhere, accuracy generally goes down. The environment affects how long sensors last.
Online specs often assume that the lab is in perfect conditions.
Find out how the monitor works with:
- Changes in temperature
- That which is wet or warm
- Shock and vibration
- Exposure to dust or chemicals
When factory automation is used, sensors that aren’t properly sealed often break down quickly. IP ratings are not marketing fluff. They are survival tools.
Signal output and system compatibility
Your sensor is only as good as the system reading it.
Check these basics:
- Output type supported by your controller
- Sampling rate requirements
- Noise filtering options
- Calibration data format
Buying online saves time, but mismatched interfaces waste it later. Always confirm compatibility before checkout.
Calibration quality and traceability
Calibration is not a one-time checkbox.
Strong suppliers provide:
- Multi-point calibration
- Axis-specific calibration data
- Traceability to standards
- Recalibration support
In medical and aerospace use cases, traceable calibration is often required by regulation. If you skip this step, decisions may be held up later. Help is more important than you think.
Sometimes you need to know what’s wrong quickly
Before you buy, make sure:
- How long it takes to answer expert questions
- Making the customization process clear
- Support available after the sale
- Quality of documentation
A cheaper listing with vague specs is generally not worth as much as one from a sensor seller who is honest about the pros and cons. Cost is more than just the amount you pay.
It’s common for the least expensive monitor to cost the most in the long run.
Some hidden costs are:
- Delays in integration
- Again, because the fit is bad
It costs money to get custom force sensors. Look at the total cost of ownership instead of just the price you pay at the store.
A quick review list
Check this list before you click “buy”:
- Ranges of force and power are checked
- The specs for accuracy fit your use case
- Mechanical design doesn’t make any concessions
- Realistic limits on the environment
- The signal source works with your system
Final thoughts
Buying a customized 6 axis force sensor online is convenient. But ease of use shouldn’t take the place of careful thought.
When systems have the right monitor, they work better, are safer, and are smarter. With the wrong one, there is more noise, delays, and stress.
Get in touch with Marex right away if you want expert advice and force sensors that are built around your specific needs instead of general ideas.
What is the biggest challenge you face when selecting force sensors for your system right now?